Intelligence Spatiale — Myxed
Intelligence
Spatiale
Un système immersif ne peut ancrer d’information que sur ce qu’il comprend. L’intelligence spatiale est la couche IA qui donne à la réalité mixte la capacité de voir : les volumes, les matières, les anomalies, les postures. La vision par ordinateur permet à une application MR de localiser une pièce au millimètre, détecter un défaut, lire l’état d’un opérateur en temps réel. Myxed conçoit et déploie cette couche sur le terrain industriel.
Qu’est-ce que l’intelligence spatiale ?
Un système immersif doit d’abord voir le monde pour pouvoir y agir. L’intelligence spatiale est la couche IA qui permet à une application MR de localiser une pièce, détecter un défaut, mesurer une posture ou lire un état physiologique, directement depuis le terrain.
Toute interface spatiale déployable sur le poste de l’opérateur commence par là.
Myxed conçoit cette couche sur mesure : modèles entraînés sur vos données, calibrés sur vos pièces, intégrés aux capteurs que vous utilisez déjà.
Cinq capacités. Un seul principe.
Détection de défauts par vision IA
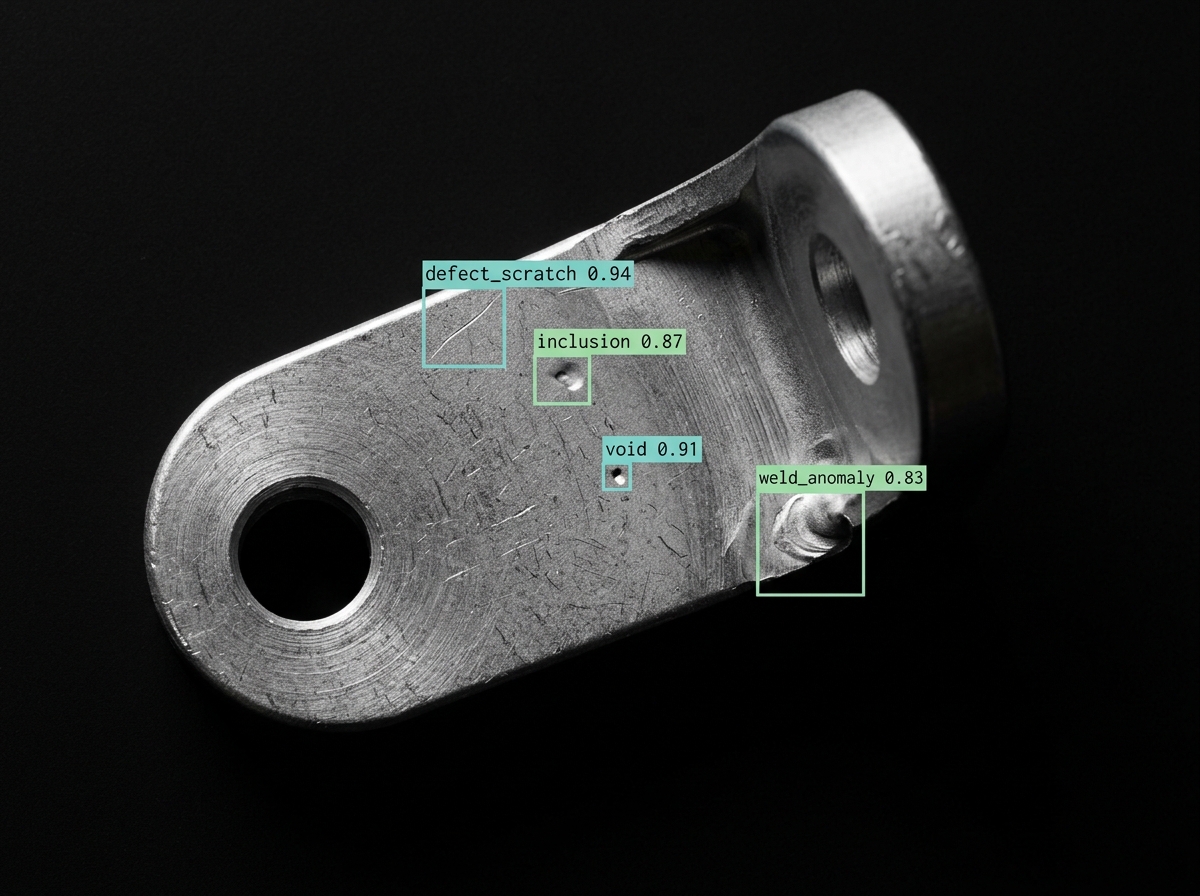
Sur une chaîne d’inspection, l’oeil humain se fatigue. Un opérateur qui contrôle deux cents pièces par équipe ne maintient pas le même niveau d’attention sur la première et sur la dernière. Un modèle de vision inspecte chaque pièce avec la même précision, à cadence constante.
Entraîné sur vos pièces, pas sur une base générique. Il apprend vos défauts réels : rayures, inclusions, manques de matière, soudures non conformes. Vos tolérances, votre réalité de production.
Estimation de position et d’orientation
Le bras robotique saisit une pièce. L’opérateur pose un composant au millimètre. L’application MR ancre une instruction sur la bonne surface. Dans chacun de ces cas, le système doit connaître la position exacte de l’objet dans l’espace : en translation comme en rotation.
Myxed entraîne ces modèles sur vos gammes de pièces. La localisation 3D est fiable, en temps réel, sans marqueur physique sur la pièce.

Génération de datasets synthétiques
Entraîner un modèle de vision nécessite des milliers d’images annotées. Les collecter sur site prend des semaines, expose des données sensibles et ne couvre jamais tous les cas limites.
Myxed génère ces datasets à partir de vos fichiers CAO : les pièces sont rendues sous différents angles et éclairages, avec les défauts à détecter. Ce qui prendrait des semaines de collecte terrain se ramène à quelques jours. Les cas limites que la production ne génère pas assez souvent sont couverts dès l’entraînement.

Captation physiologique
La charge cognitive d’un opérateur en formation ou d’un ingénieur en design review ne se déclare pas. Les capteurs intégrés aux casques XR — eye-tracking, fréquence cardiaque, réponse cutanée — l’enregistrent pendant la session, sans interrompre le travail.
Myxed collecte, structure et interprète ces données pour objectiver ce que l’entretien post-session ne saisit pas : l’attention réelle, le stress, la fatigue, l’engagement cognitif.
Inspection terrain : la convergence humain-machine
La machine inspecte des pixels à cadence constante, calcule, traite en continu, ne se fatigue pas. L’humain contextualise une anomalie, collabore, décide en présence d’information incomplète. Ces deux formes d’intelligence ne se substituent pas : elles convergent.
La réalité augmentée est le point de jonction. Elle permet à l’opérateur de recevoir en temps réel les analyses du modèle de vision, superposées à ce qu’il voit. L’intelligence spatiale rend cette jonction possible : elle donne à l’application RA la compréhension de l’environnement qui entoure l’opérateur, les surfaces, les objets, les volumes, les anomalies.
Myxed déploie ses modèles sur caméras industrielles fixes, sur postes de contrôle existants, ou directement dans les applications de réalité augmentée. Sans modifier le workflow de l’opérateur.

Ce que ça donne sur le terrain
Contrôle qualité sur pièces PCB et composants aéronautiques
Sur une ligne de production électronique ou aéronautique, le contrôle visuel manuel est lent, subjectif et non traçable. Les tolérances sont serrées. Les défauts sont microscopiques. Une soudure froide sur un PCB, une microfissure sur un longeron, un manque de matière sur un joint d’étanchéité : l’oeil humain rate ces anomalies en condition de fatigue ou sous cadence.
Myxed entraîne un modèle de détection sur vos pièces réelles et vos défauts documentés. Le modèle s’intègre à votre poste de contrôle existant (caméra industrielle ou casque MR), inspecte chaque pièce, classe chaque anomalie, génère une traçabilité automatique.

Design review avec captation physiologique — contexte automotive
Évaluer un véhicule en réalité mixte à l’échelle 1:1 réduit le coût des itérations avant le premier prototype physique. Ce que la session ne dit pas : quelles zones ont retenu l’attention, à quel moment la charge cognitive a basculé, ce qui a généré de l’engagement ou du décrochage.
Myxed a équipé les participants d’une session de design review d’un dispositif de captation physiologique (eye-tracking, fréquence cardiaque, réponse cutanée) pendant l’exploration du modèle 3D. Les données ont été corrélées aux zones de l’habitacle, aux moments de charge cognitive élevée, aux éléments qui ont retenu ou perdu l’attention.
Formation immersive avec feedback physiologique
Un opérateur en formation sur geste rare ou procédure critique peut paraître attentif sans l’être. La séquence avance. Le formateur n’a pas de signal objectif sur la charge cognitive, le stress ou la fatigue du stagiaire.
Myxed intègre la captation physiologique aux modules de formation immersive : les capteurs du casque suivent l’attention, la fréquence cardiaque et les mouvements oculaires pendant chaque séquence. Le responsable formation reçoit un tableau de bord par apprenant, avec les zones d’attention, les pics de stress et les moments de décrochage.
Quatre secteurs. Des environnements critiques.
Défense
Les systèmes d’inspection fonctionnent dans des environnements restreints, sur des équipements que l’on ne peut pas arrêter longtemps. La marge d’erreur sur les défauts est nulle.
Aéronautique / Avionique
Chaque surface est une surface de conformité. Chaque geste d’assemblage a une conséquence documentée. Les modèles de vision sont entraînés sur des tolérances qui se mesurent en microns.
Automobile
Les cycles sont comprimés, les équipes de validation réparties sur plusieurs sites, les décisions prises avant le premier prototype physique. Les réunions ne disent pas qui regardait quoi pendant la session. L’intelligence spatiale si.
Luxe
Une expérience de marque se construit au millimètre. La captation physiologique mesure où le regard s’arrête, ce qui génère de l’engagement, ce qui laisse indifférent, pendant que le visiteur est dans l’espace et non après.
La méthode Myxed appliquée à l’intelligence spatiale
Quatre étapes. Chaque livrable est utilisé sur le terrain.
Cadrer
Identifier le problème opérateur précis : la pièce, le geste, l’anomalie, la décision. Définir les données disponibles, les contraintes terrain, les métriques de succès.
Prototyper
Construire un premier modèle sur un sous-ensemble de données. Le tester en conditions réelles, pas en laboratoire. Mesurer les écarts. Itérer.
Construire
Développer le modèle complet, intégrer au dispositif cible (casque, caméra industrielle, poste de contrôle). Valider avec les équipes terrain qui l’utiliseront.
Déployer
Livrer une solution qui fonctionne dans votre environnement de production, sur vos équipements, avec vos opérateurs. Documenter. Transférer les compétences.

Ce que les chiffres disent
Réduction du taux de rebut sur les lignes où l’intelligence spatiale remplace ou complète le contrôle visuel manuel.
Délai de retour sur investissement constaté sur les déploiements en contrôle qualité et en formation immersive.
Économies générées sur un site de 200 personnes par la combinaison formation immersive et contrôle qualité guidé.
Réduction du temps d’entraînement des modèles grâce à la génération de datasets synthétiques à partir des fichiers CAO.
« Apportez-nous la pièce, la ligne, le geste ou le défaut. Nous entraînons le modèle qui les comprend. »
Vos données restent sur site.
Modèles entraînés et déployés en local
Myxed entraîne et déploie ses modèles en environnement local. Aucune donnée industrielle ne transite par un serveur externe.
Déploiement on-premise
Le déploiement s’effectue sur votre infrastructure existante, sans connexion Internet requise en production. Le modèle s’installe là où se trouvent vos données.
Acteur français et européen, composants auditables
Myxed est un acteur français et européen. Nos modèles respectent les licences commerciales et open source applicables. Chaque composant est auditable.
Architecture air-gap pour environnements critiques
Pour les environnements critiques — défense, aéronautique, industrie réglementée — une architecture air-gap est disponible sur demande.

Votre cas d’usage est le point de départ.
Chaque modèle que Myxed construit part d’une réalité terrain précise : une pièce, un geste, une anomalie, un environnement. Apportez-nous le vôtre. Nous construisons le modèle.